

האדם שתמיד שאף להקל על עצמו בכלל ועל ביצוע הניווט בפרט, המציא עזרים לשימושו. העזר המתקדם ביותר והידידותי ביותר לנווט הוא מערכת ה- GPS.
שימו לב שהכתבה היא משנת 2004! ועוסקת במכשירי GPS קשוחים וישנים (שעדיין עושים את עבודתם נהדר) אך בשונה מימינו כשיש אפליקציות עם מפות טופוגרפיות על הסמארט-פונים (ועליהם אכתוב בנפרד).
מאת: Ofer Ogash
03/08/04
אף לא לנווט בעל ניסיון, זאת מכיוון שהניווט דורש השקעה בהכנת ציר עוד בטרם נצא לדרך, ריכוז והתמקדות בניווט תוך כדי התנועה בשטח ובעיקר, אורך רוח. הקוראים שעקבו אחר שש כתבות הניווט הטופוגרפי שפורסמו עד כה, נחשף לעולם מרתק של ניווט והתמצאות בשטח, אך אליה וקוץ בה - התענוג דורש מקצוענות. ועל-מנת להיות מקצועניים נדרש לא רק לדעת את החומר התיאורטי אלא לתרגל הרבה ולהמשיך לתרגל, וגם אז אין המשימה קלה וגם הטוב שבנווטים יכול להתברבר (לא למצוא את דרכו) אם לא ישקיע בהכנת הניווט ובניווט עצמו.

ולצורך ניווט בשטח - המפה הטופוגרפית, ולצידה - המצפן ומד הקואורדינאטות. אך גם מפה, ואפילו מפת כבישים פשוטה, יש לדעת לקרוא. כאן בא לעזרתנו עזר פשוט ביותר, שכולנו מכירים - שלטי ההכוונה בדרכים המאפשרים לנו להגיע ליעד ללא שימוש במפה. האמצעי המקביל של שלטי ההכוונה בשטח הוא ''סימון שבילים''- פרויקט ארצי של הוועדה לסימון שבילים, אשר סימנה מספר רב של מסלולי טיול בצבעים שונים, כך שאפשר לנוע ''בין הרים ובין סלעים'' לאורכם של הסימנים מבלי להיות מומחה בניווט. שיטה ישנה יותר שהונהגה בארץ בתקופת המנדט הבריטי היא מיפוי על-ידי טריאנגולציה, או ''טריג'' בקיצור, המאפשרות לראות מנקודה אחת בשטח שתי נקודות אחרות. הרעיון בשיטה הוא למפות את השטח על- פי חלוקה למשולשים. מותחים שני קוים על המפה בין שתי נקודות ידועות לכיווננו, כאשר נקודת החיתוך שלהם היא המיקום העצמי. זכר לשיטה זו נשאר הסימון במפה - משולש ובתוכו נקודה, ומעט סימונים בשטח – בצורת בזנ''ט קטן התקוע באותן נקודות ''טריג'' (במקום ש ל א ה ו צ י א ו א ת ה ב ז נ '' ט שסימן את הנקודה) .

הנווט בשטח יכול לזהות את מיקומו העצמי בעזרת ''חיתוך'' משתי נקודות ידועות בשטח אשר אותן אנו מאתרים במדויק במפה ומזהים אותן ממקומנו בשטח. אפשרות נוספת ''לדקירת'' מיקום עצמי היא ''חיתוך'' מנקודה אחת ידועה בעזרת מדידה של אזימוט חוזר וטווח (למי שיש מכשיר למדידת טווח), מאותה נקודה ידועה אל המקום בו אנו נמצאים.

מערכת ניווט למציאת מיקום עצמי הנמצאת בשימוש שנים רבות ביבשה, בים ובאוויר, היא המערכת האינרציאלית. הרעיון העומד מאחורי המערכת דומה מאוד לשיטה של ניווט על-פי אזימוט ומרחק. המערכת יודעת לחשב על-פי מדידת המרחק והכיוון, את קואורדינאטות המיקום העצמי. המרחק מחושב מהספידומטר או בדרך אחרת על-פי מהירות הכלי והכיוון מתקבל ממצפן. במערכות היקרות קיים מצפן המנטרל את השפעת המאסה של כלי הרכב באמצעות ג'יירואים (סביבונים) או על-ידי מצפן מסוג שטף מגנטי (והיום אף מפתחים מצפני GPS). הבעיה במערכת האינרציאלית היא ''הסחיפות'', כלומר, לאורך מרחק סוטה הנ.צ. המתקבל מהמיקום העצמי המדויק בשל אי-התחשבות המערכת בעליות / מורדות (הגורם התלת-מימדי במערכת הקרקעית) ומערכות הקרקעיות בהחלקה או ''פירפור'' של גלגלי הרכב שמהם מתקבל נתון המרחק. פתרון לבעיה ניתן על-ידי ''איפוס'' המערכת בנקודות מסוימות שאותן אנו מכירים בוודאות ושאליהן אנו מגיעים תוך-כדי הניווט.
מערכת ה-GPS הומצאה ויושמה על-ידי משרד ההגנה האמריקני, בשנות ה-60, וייעודה המקורי היה לספק מיקום עצמי לכוחות היבשה, הים והאוויר של הצבא האמריקאי בכל מקום בעולם ולכל חייל כולל מערכות לא מאוישות (מטוסים ללא טייס, טילים). בפועל המציאות הייתה חזקה מהחזון והמערכת הפכה מהר מאוד לנחלת השימושים האזרחיים, בדומה להתפתחות האינטרנט. כיום, אין כמעט גוף אזרחי הנדרש לנווט ואינו משתמש ב-GPS: אוניות, מטוסים, ציי-רכב ותובלה, חברות לאיתור ומעקב, מודדי קרקע והאזרח ''הרגיל'' המשתמש במערכת לניווט עירוני או לניווט בשטח.

המקיפים את כדור הארץ ומשדרים אלינו נתונים של זמן ומקום באופן רציף ובנוסף קיימות תחנות קרקעיות המשמשות לניהול ובקרת הלוויינים. האותות הנקלטים על כדור הארץ מאפשרים למכשיר ה-GPS לתרגם את הזמן והמיקום של כל לוויין ולספק למשתמש מיקום עצמי של המכשיר. המקלט, המכשיר שבידי המשתמש, יודע לחשב ולהציג את מיקומו העצמי באופן דו-מימדי לאחר קליטה של שלושה לוויינים לפחות בו זמנית ולאחר קליטה של הלוויין הרביעי (ומעלה) יודע המכשיר להציג מיקום עצמי תלת-מימדי (נוסף מימד הגובה).

יש יותר מארבעה לוויינים מעל האופק שאותם מצליח המכשיר לקלוט, כך שהמקלט בורר לו את הלוויינים ''הטובים'' יותר עבורו על-פי קריטריונים של איכות הקליטה והזווית שבין האותות (הגיאומטריה) המתקבלים מהלוויינים השונים ומהם מחשב את המיקום העצמי. רוב המקלטים מספקים אינדיקציה לעוצמת / איכות הקליטה ומספר הלוויין שנקלט. מידע זה יכול לעזור למשתמש בהערכת הדיוק המתקבל מהמכשיר. מכאן שאחד הפרמטרים החשובים בבחירת מכשיר GPS הוא רגישות האנטנה ומהירות יכולת העיבוד של הנתונים המתקבלים ממנה. ככול שהאנטנה רגישה יותר, המכשיר יקלוט מספר רב יותר של לוויינים וככול שמהירות העיבוד גדולה יותר יתקבל נתון של נ.צ. (נקודת ציון) מדויק יותר.

הנתון הבסיסי המתקבל מהGPS הוא נקודת הציון במיקום העצמי של האנטנה. שאר הפונקציות שאנו מכירים או שנכיר במכשירים שבידינו, כגון ניווט אל היעד, הצגת נקודת הציון על מפה, מסכי ''מצפן'' הם מתוך התוכנה של המכשיר עצמו, שכיום הוא בעל מעבד ממוחשב.

מכיוון שלארצות הברית שליטה על הנתונים שמשדר הלוויין ביכולתם גם לשבשם ובכך לגרום למקלט שבידינו לספק נתון של מיקום עצמי מוטעה. כיום, על-פי צו מתקופת הנשיא קלינטון טוענים האמריקאים כי אין הם משבשים יותר את הנתונים אך כהצהרתם הם שומרים לעצמם את האפשרות לעשות כן בכל מקום ובכל זמן שיימצאו לנכון. בנוסף על כך קיימים גורמים ''אובייקטיביים'' נוספים המשבשים את איכות נקודת הציון המתקבלת וביניהם: המרחק הרב שבין הלוויין למקלט, המעבר מהיונוספרה לאטמוספרה, תיאומי שעונים ועוד. כך שבמצב הרגיל, איכות הדיוק של נקודת הציון המתקבלת היא ברדיוס של כ-25 מטר. רק לידיעה : לחיילי ארצות הברית ולבנות בריתה מקלטים היודעים לתרגם תדר מוצפן נוסף (P-CODE) ששולחים לוויני הGPS- ובעזרתו רמת הדיוק שהם מקבלים טובה יותר.
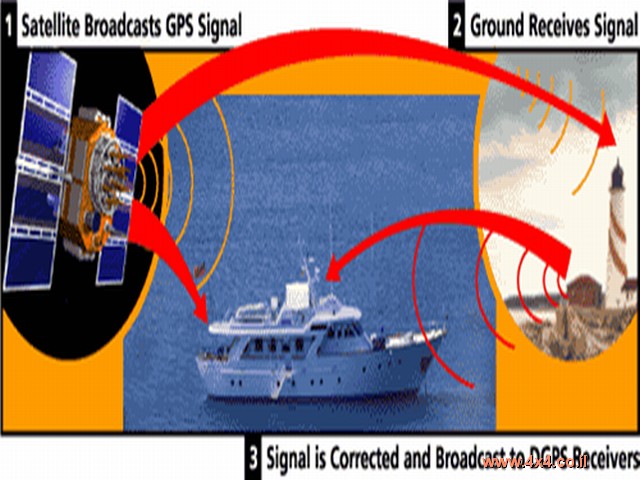
מכיוון שה-GPS הפכה למערכת נפוצה בשימוש אזרחי, התפתחו להם עם השנים, בעיקר בארצות הברית, שירותים לשיפור הדיוק. בהשקעה כספית נכונה, יכולים הרוצים בכך להגיע לרמת דיוק של מודדי קרקע. הרעיון הוא פשוט: אם בנקודה מסוימת הידועה לנו נדע מהי הסטייה המתקבלת מה-GPS שם - נוכל להסיק מכך כי סטייה דומה תתקבל לכל נקודת ציון אחרת באותו מרחב - סוג של תיקון זה נקרא תיקון דיפרנציאלי. בנוסף על כך - ככל שנשהה ללא תזוזה זמן רב יותר באותה נקודה, נוכל ''לבקש'' ממקלט הGPS- לבצע מיצועים (מלשון ממוצעים) של נקודות הציון המתקבלות ולספק לנו נתון של נקודת הציון העצמית בדיוק רב יותר. מכאן, שהמערכת לתיקון דיפרנציאלי סטטי שבה משתמשים מודדי הקרקע היא המדויקת יותר - גם נמצאת זמן רב באותה נקודה וגם מקבלת תיקון דיפרנציאלי המשודר מנקודה אשר מדודה בדיוק רב.

עד לא מזמן פעלו בארצות הברית רק מערכות קרקעיות לתיקון דיפרנציאלי דינאמי (כלומר לגופים הנמצאים בתנועה - כמו יאכטה). כך שתמורת תשלום הורשה המשתמש לקלוט תדר רדיו מוצפן שסיפק את הווקטור (אזימוט וטווח) של הסטייה העכשווית. לפני מספר שנים נכנסה לשימוש מערכת ה-WAAS - מערכת אזרחית לתיקון דיפרנציאלי לשגיאות בGPS הפועלת בגיבוי לוויין ומשדרת לקרקע את התיקון הנדרש. המערכת מופעלת מתוך לוויין תקשורת המצוי מעל נקודה קבועה (ולכן פועלת רק באזור שבו יש גיבוי לווייני מתאים) ומשדרת את נתוני הטעות העכשוויים. מקלט ,GPS אשר מסוגל לקלוט תשדורת זו, מעבד נתונים אלו ומציג למשתמש נקודת ציון בדיוק של כ-3 עד 5 מטרים לערך. המערכת האזרחית הפועלת באופן מלא מעל צפון אמריקה נקראת WAAS - Wide Area Augmentation System ואילו זו הפועלת מעל אירופה (וישראל) נקראת EGNOS – European Geostationary Navigation Overlay Service .
הכתבה הבאה תעסוק בעיקר בעקרונות הניווט עם המכשיר, שימוש נכון במכשיר ובתיאור מושגים שונים מעולם ה-GPS. הכתבה שלאחריה תערוך השוואה בין מכשירים שונים בשוק. עד אז לשאלות ותגובות בפורום הניווט של האתר (בקישור המצורף בכחול). או בדוא''ל ישירות לכותב ogash@4x4.co.il
קישור לפורום הניווט באתר

כתבה חדשה: סיכום טיול ג'יפים אל הגבים בדרום - 7/6/25
כתבה חדשה: פקינג-פריז 2025: ראלי קלאסיקות במדבר
כתבה חדשה: אאודי Q3 החדש: כל הפרטים
כתבה חדשה: חוזרים לשגרת הטיולים עם מסע חוצה ישראל והדרכות נהיגה
כתבה חדשה: גיבורים בעלייה מועדון ראם - סיכום טיול סמלת לפצועי צה"ל בית הלוחם ירושלים
כתבה חדשה: מילון השטח של טויוטה לנד קרוזר 250
טיול ג'יפים רטוב לעמק המעיינות
הדרכת נהיגת שטח - מועדון סוזוקי SUZUKI
הדרכת נהיגה בשטח טרשי - יער בן שמן
נפתחה עונת הרחצה - טיול ג'יפים למעיינות ברמת סירין
קירגיזסטן - מסע ג'יפים לארץ הנוודים - יולי 2025
הודו הימלאיה - מסע אופנועים למעברי ההרים הגבוהים בעולם
הדרכת נהיגת שטח - מועדון KGM רקסטון
הדרכת נהיגה בשטח טרשי - הר חורשן
טיול ג'יפים לצפון מדבר יהודה - מעיינות, נופים ומנזרים
מסע חוצה ישראל 6 ימים בעבירות קלה עד בינונית - קיץ 2025



























תגובות